Hyundai Elantra (CN7): Advanced Driver Assistance System (ADAS) / Parking Distance Warning (PDW)
Description and operation
| Description |
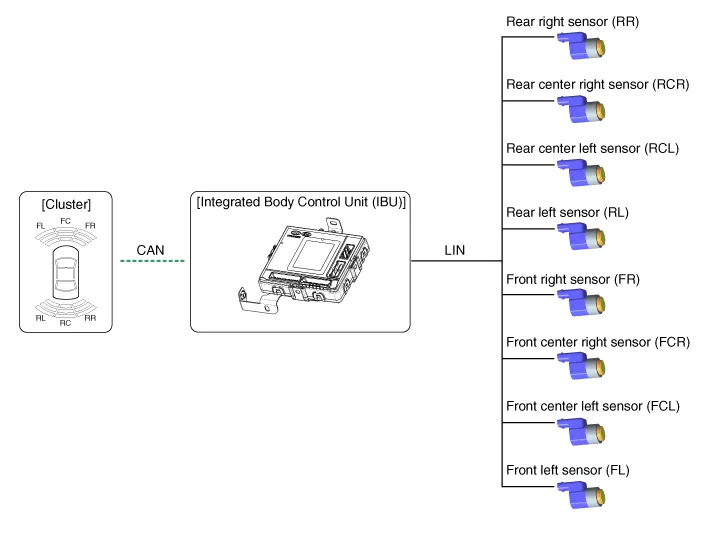
| • | PDW consists of 8 sensors (front : 4 units, rear : 4 units) that are used to detect obstacles and transmit the result in three separate warning levels, the first, second and third to IBU via LIN communication. |
| • | IBU decides the alarm level by the transmitted communication message from the slave sensors, then operates the buzzer or transmits the data for display. |
| Initial mode |
| 1. | System initializing time
|
| 2. | PDW recognizes LID and sets the sensor ID up during initialization. |
| 3. | PDW activates each sensor and then executes the diagnosis after finishing initialization of IPM(IBU). |
| 4. | PDW starting buzzer is normally worked, when sensor does not send an error message and after finishing error diagnosis. |
| 5. | If any failure is received from the any sensors, PDW starting buzzer does not work but the failure alarm is operated for a moment. If you have display option, warning sign is also shown on it.
|

| 6. | IBU memorizes the completed initializing status of sensor. |
| Normal mode |
| 1. | PDW-F : Lin communication starts and keeps the routine after IGN1 ON+D gear + below 10 km/h. PDW-R : Lin communication starts and keeps the routine after IGN1 ON+R gear |
| 2. | After initializing, the routine starts at once without PDW starting warning sound. |
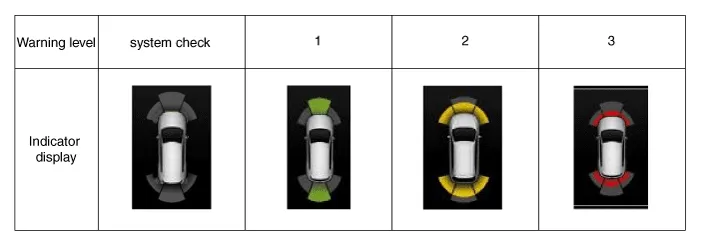
| 3. | Alarms of obstacle consists of 3 level 1,2,3 step and 1,2 alarm sounds intermittently and 3 alarm sounds continuously. 1 level alarm doesn't exist in the front ultrasonic sensor. |
| 4. | In display, the data of each sensor is sent from IBU to display, for example cluster. CAN communication is used for transmission and maximum gateway time is 50ms. |
| 5. | The efficient vehicle speed of PDW operation is under 10Km/h. |
| 6. | Operation doesn't start or stops at gear N, P. |
| Level | Distance range | Allowed range |
| 1 | Front : 61 - 100 cm (24.02 - 39.37 in.) / Rear : 61 - 120 cm (24.02 - 47.2 in.) | ± 15 cm (5.90 in.) |
| 2 | 31 - 60 cm (12.20 - 23.62 in.) | ± 15 cm (5.90 in.) |
| 3 | 0 - 30 cm (0 - 11.81 in) | ± 10 cm (3.94 in.) |
Components and components location
| Component Location |
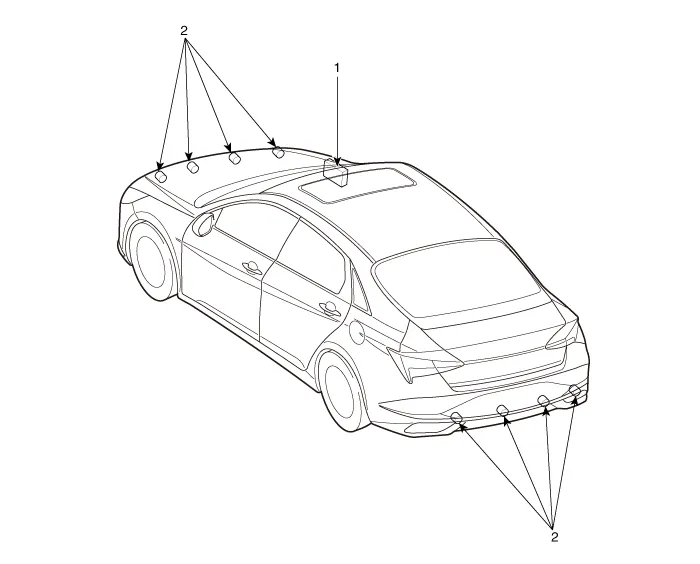
| 1. Integrated body control unit (IBU) | 2. Ultrasonic sensor |
Specifications
| Specifications |
|
Item
|
Specification
| |
| Ultrasonic sensor | Voltage rating | DC 12 V |
| Detecting range | 11.8 - 47.2 in. (30 - 120 cm) | |
| Operation voltage | DC 9 - 16 V | |
| Operation current | MAX 350 mA | |
| Operation temperature | -22 - 176°F (-30 - 80°C) | |
| Operation frequency | 48 ± 5 KHz | |
| Number of sensors | 8 units | |
Parking Distance Warning (PDW) Sensor
Schematic diagrams
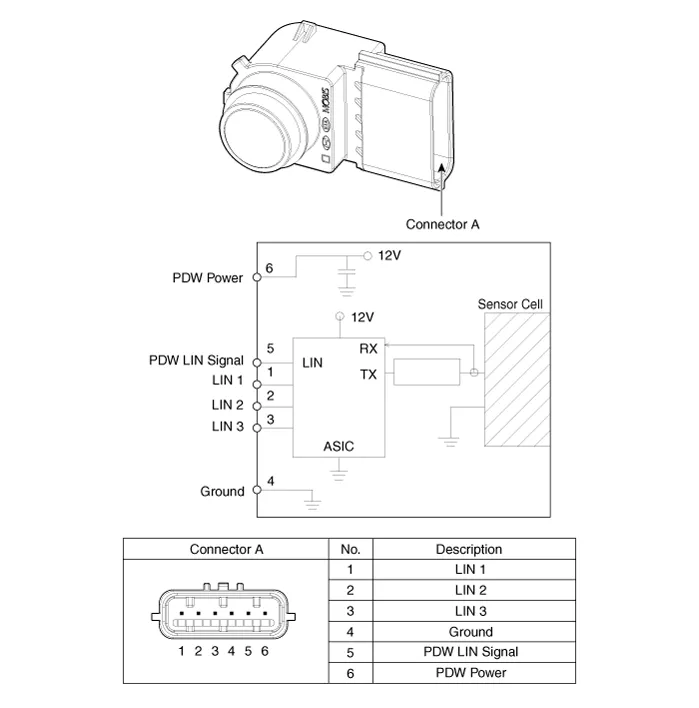
| Circuit Diagram |
Repair procedures
| Removal |
| 1. | Remove the bumper cover. (Refer to Body - "Front Bumper Cover") (Refer to Body - "Rear Bumper Cover") |
| 2. | Disconnect the ultrasonic sensor connector (A) and remove the ultrasonic sensor (B).
|

| Installation |
| 1. | Install the ultrasonic sensor. |
| 2. | Install the bumper cover. |
Components and components location Components1. BSD Indicator2. Side repeater lamp Repair procedures Inspection1.Disconnect the negative (-) battery terminal.
Description and operation DescriptionRear view camera will activate when the backup light is ON with the ignition switch ON and the shift lever in the R position.
Other information:
Hyundai Elantra (CN7) 2021-2026 Service Manual: Ambient Temperature Sensor
Description and operation DescriptionThe ambient temperature sensor is located at the front of the condenser and detects ambient air temperature. It is a negative type thermistor; resistance will increase with lower temperature, and decrease with higher temperature.
Hyundai Elantra (CN7) 2021-2026 Service Manual: Blower Unit
Components and components location Component Location1. Blower unit assemblyComponents1. Blower unit assebmly2. Blower upper cover [LH]3. Duct seal4. Blower upper cover [RH]5. Intake actuator6. Air filter cover7. Intake door8. Air filter9. Blower upper case10.
Categories
- Manuals Home
- Hyundai Elantra Owners Manual
- Hyundai Elantra Service Manual
- Rear Seats
- Front Bumper
- Engine Mechanical System
- New on site
- Most important about car
